 中文
中文 English
English
装配机器人*概述
装配机器人【assembly robot】 为完成装配作业而设计的工业机器人。它是柔性自动化装配系统的核心设备,由机器人操作机、控制器、末端执行器和传感系统组成。其中操作机的结构类型有水平关节型、直角坐标型、多关节型和圆柱坐标型等;控制器般采用多CPU或多计算机系统,实现运动控制和运动编程;末端执行器为适应不同的装配对象而设计成各种手爪和手腕等;传感系统又来获取装配机器人与环境和装配对象之间相互作用的信息。
常用的装配机器人主要有可编程通用装配操作手即 PUMA 机器人和平面双关节型机器人即SCARA机器人两种类型。与般工业机器人相比,装配机器人具有精度高、柔顺性好、工作范围小、能与其他系统配套使用等特点,主要用于各种电器的制造行业。
装配机器人*结构组成
机器人般可理解为:种可编程的通过自动控制去完成某些操作和移动作业的机器。机器人的般结构如下:
机器人整机,基本上由两部分组成,是操作机,是控制装置,操作机是机器人的本体结构,包括: 基座、驱动器或驱动单元、手臂、手腕、末端执行器、行走机构以及安装在操作机上的各种感受装置等。控制装置般包括计算机控制系统、司服驱动系统、电源装置以及与操作者联系的装置等。
驱动器或驱动单元是机器人的动力执行机构,根据动力源的类别不同, 可分为电机驱动,液压驱动和气动驱动三类。电动驱动在多数情况下采用直流、交流司服电机, 也可采用力矩电机、步进电机等。
手臂和手腕是机器人操作机中的基本部件,它由旋转运动和往复运动的机构组成。其结构形式是多种多样的,但多数机器人的手臂和手腕是由关节和杆件构成的空间机构,般有3— 10 个自由度组成,工业机器人般有3— 6 个自由度,由于机器人具有多自由度手臂、手腕的机构,使操作运动具有通用性和灵活性,这也是区别于般自动机的特点。
末端执行器是机器人手腕末端机械接口所连接的直接参与作业的机构,如夹持器,焊钳,焊枪,喷枪或其他作业工具,传感器等。
行走装置分轮式、履带式和步行式等几种,也可用采用螺旋桨式或其他形式的推进机构,工业机器人多采用轮式机构。
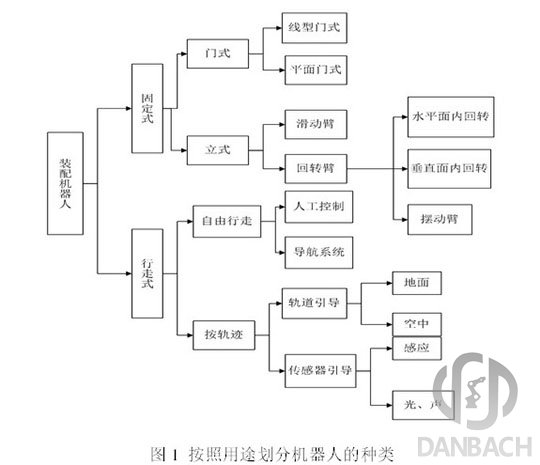
装配机器人*分类
装配机器人*参数

装配机器人*用途
机器人的应用已经涉及到工业、农业、林业、医疗、海洋探测、太空、娱乐等很多领域。方面,机器人作为种特殊的自动机器在工业领域几乎已经无所不在,很多大公司甚至把机器人作为个新产业在抢占制高点;另方面, 科学们正在让机器人更加人性化,给机器人赋予更多的智慧和情感。机器人在生产中的应用,对提高劳动生产率,提高产品质量,改善劳动条件,提高企业的竞争能力和应变能力,促进新产业的建立和发展,改变劳动结构,以及促进相关学科的技术进步,均发挥了重大的社会效益和经济效益。
目前,在汽车装配行业中,人工已逐渐被自动化的生产线所取代,在挡风玻璃的装配中,由于汽车挡风玻璃宽大,人工不易安装和操作的特点,为适应时代的发展,减少工人的劳动强度和劳动量, 节约劳动成本, 改善工作环境, 保证安全操作,促进文明生产。随着机器人技术的不断发展和完善,以及机器人成本的进步降低,可以预料,今后将开拓更多的机器人应用领域,尤其是在制造业以外的领域中,机器人将会有很好的应用前景。
装配机器人*使用方法
1、使用设备实行定人定机制,凭操作证操作设备。当有多人操作时,必须有专人进行指挥。
2、操作者要熟悉所使用设备的主要技术性能、结构、保养内容和完好标准。
3、工作前的准备工作
(1) 检查设备的传动系统、操作系统、润滑系统、气动系统、各种开关起始位置、安全制动防护装置,电力稳压系统及电气指示等,上述系统要齐全、正确、灵敏、可靠、完好。紧固件连接件不应松动。
(2) 按设备润滑图表注油润滑。
(3) 以手动方式低速运转各伺服轴。
4、工作中的正确操作
(1)按设备说明书合理使用,正确操作。禁止超负荷、超性能、超规范使用。
(2) 在次操作时,操作者要和编程人员密切配合,在确认程序无误后,方可转入正式加工。
(3) 在操作过程中,操作者不得离开岗位,工作中严禁随意拉闸断电。
(4)设备运行中注意异常现象,发生故障及时停车,采取措施,并记录显示故障内容。发生事故,应立即断电,保护现场,及时上报,不得隐瞒,并配合主管部门做好分析调查工作。
5、工作后的保养
(1) 操作者要及时清理设备上的杂物,整理工作现场,做好保养工作。
(2)设备保养完毕,操作者要将设备各开关手柄及部件归原位。按规定顺序切断电源。
(3) 按交接班制度规定进行交接,并做好记录。
装配机器人*维护和保养
1、选择合适的使用环境
工业机器人的使用环境会直接影响机器人的正常运转,因此在安装时应严格做到机床说明书规定的安装条件和要求。
2、应为机器人配备专门的编程、操作和维修人员
这些人熟悉所用机器人的机械、控制系统、强电设备、液压、气压等部分及使用环境等,并能根据说明书的要求正确使用。
3、伺服电机的保养
对工业机器人、数控机床等机械的伺服电动机,要每10-12 个月进行次维护和保养。维护保养的主要内容有:用干燥的压缩空气吹除电刷的粉尘;检查电刷的磨损情况,如需要更换,选用规格型号相同的电刷,更换后要空载运行定时间使其与换向器表面吻合;检查清扫电枢整流子以防止短路;清洗检查后,按原接线方法和顺序组装后进行检查。
4、电气柜的清扫
电气柜内的电路板和元器件上有灰尘、油污时,很容易引起设备故障。因此机器人的电气柜要根据使用环境定期清扫,般情况下8-12 个月清扫次;如环境潮湿、灰尘较多,六个月必须清扫次。
5、设备电缆线的检查
主要检查电缆线的移动头、拐弯处是否出现接触不良、断线或短路等故障。
6、长期不使用设备的保养
在机器人闲置不用时,应经常给设备通电,在机器人锁住的情况下,使其空运行。在空气潮湿的季节,应该天天通电,利用元器件本身的发热驱走设备内的潮气,以保证电子部件的性能稳定可靠。
-

-
工厂自动化整体解决方案提供商
服务至上 ● 诚信诚心
- 全国服务咨询热线
- 400-697-1188
